10年内无法实现L3/L4级无人驾驶,其中原因包括感知、成本、(高精度地图)定位、深度学习等多方面因素。高精度定位和高精度地图是合二为一无法分割的,要利用高精度地图,首先得清楚自车的高精度定位。虽然现在很多都说重感知,轻地图,但很多时候,高精度地图和高精度定位是绝对无法缺少的,比如城市多车道,某些车道只能直行,不能拐弯,而临近车道可以,再有实线不能变道,双黄线不能调头,如果你不知道自己在哪条车道上,自然也就无法做出正确的路径规划,这些都要车道级定位和车道级地图,也就是高精度地图和高精度定位。
这是个硬规则,换句话说,概率准确度至少要在95%以上,最好不用概率统计法,尽量做到100%准确的物理方法,这是因为,基于视觉参照物体系定位精度的概率在光线变化频繁的市区,概率或者说置信度估计不会高于60%。基于多星或者多频算法的定位精度概率一般也只有50%。高精度地图和高精度定位是L3/L4级无人驾驶必须的,但10年内中美欧的高精度定位都难以实现,日本现在勉强可以实现,但日本对无人驾驶的兴趣度很低,日系车一向讲究尽量压缩成本,电子系统不追求先进,能用就行。所以我们看到本田搞了所谓的L3级车,但只有100辆,且只租不卖,丰田也只是在奥运会期间搞辆无人驾驶小巴。

图片来源:QZSS
日本最初为救灾开发的QZSS可以满足目前无人驾驶所需要的高精度定位,QZSS也覆盖了澳大利亚中东部地区,早在2010年日本也靠QZSS为澳大利亚中东部地区输出了无人农业技术。

图片来源:QZSS
中国则在2020年开始提供北斗公开服务信号B2b和精密单点定位服务信号PPP-B2b,RNSS服务B2b信号,由北斗三号24颗中圆地球轨道(MEO)卫星和3颗倾斜地球同步轨道(IGSO)卫星在全球范围内播发,北斗三号RNSS服务信号在原B1I/B3I、B1C/B2a基础上又添一员,可为用户提供更多享受RNSS服务信号的选择。
服务精度方面,B2b信号与其它信号相同,空间信号精度优于0.5米;全球定位精度将优于10米,测速精度优于0.2米/秒,授时精度优于20纳秒;亚太地区定位精度将优于5米,测速精度优于0.1米/秒,授时精度优于10纳秒。 PPP服务B2b信号,由北斗三号三颗地球同步轨道(GEO)卫星在我国及周边地区播发,可为用户提供公开、免费的高精度服务,也是北斗系统首次对外发布的高精度服务信号。
PPP-B2b服务系统示意图

图片来源:北斗
不过北斗三号使用的是PPP技术,即Precise Point Positioning,它使用一台接收器的非差分载波相位观测数据进行单点定位,但是其不能使用差分的方式消除误差,所以利用精密卫星轨道和精密卫星钟差进行修正,即可以达到厘米级的高精度。
采用北京、三亚、拉萨、且末、上海、西安和昆明站数据进行了BDSBAS的精度评定,结果表明,BDSBAS单频定位性能满足国际民航一类精密进近要求,水平定位精度好于2.1m(95%统计精度),高程定位精度好于3.5m(95%统计精度)。

图片来源:卫星导航国际期刊
这是只使用北斗SBAS的结果,达不到无人驾驶所需要的精度,且各个地区差别较大,精度最高的似乎是上海,南方和北方效果都不太好,所以PPP是必须的。
我国PPP采用双频伪距和载波的无电离层组合,可以消除电离层一阶项影响。伪距和相位无电离层组合观测方程可表示为:

PPP定位对智能驾驶来说有几个致命缺点,首先是收敛时间,对智能驾驶而言,收敛时间最好在1秒甚至30毫秒以内,速度越高,收敛时间就该越短,不过PPP收敛时间一般是20-30分钟。

图片来源:武汉大学学报之《北斗三号 PPP-B2b 服务性能评估》,时间越长精度越高
PPP第二个缺点是成本,这需要高精度接收机和天线,价格大约在1~20万元之间。日本QZSS使用的是PPP-RTK,收敛时间在1秒钟以内,且成本极低,基本只有软件成本,无新增硬件成本,做无人驾驶最合适。

图片来源:《PPP-RTK技术面临的机遇与挑战》,张小红,任晓东,武汉大学测绘学院
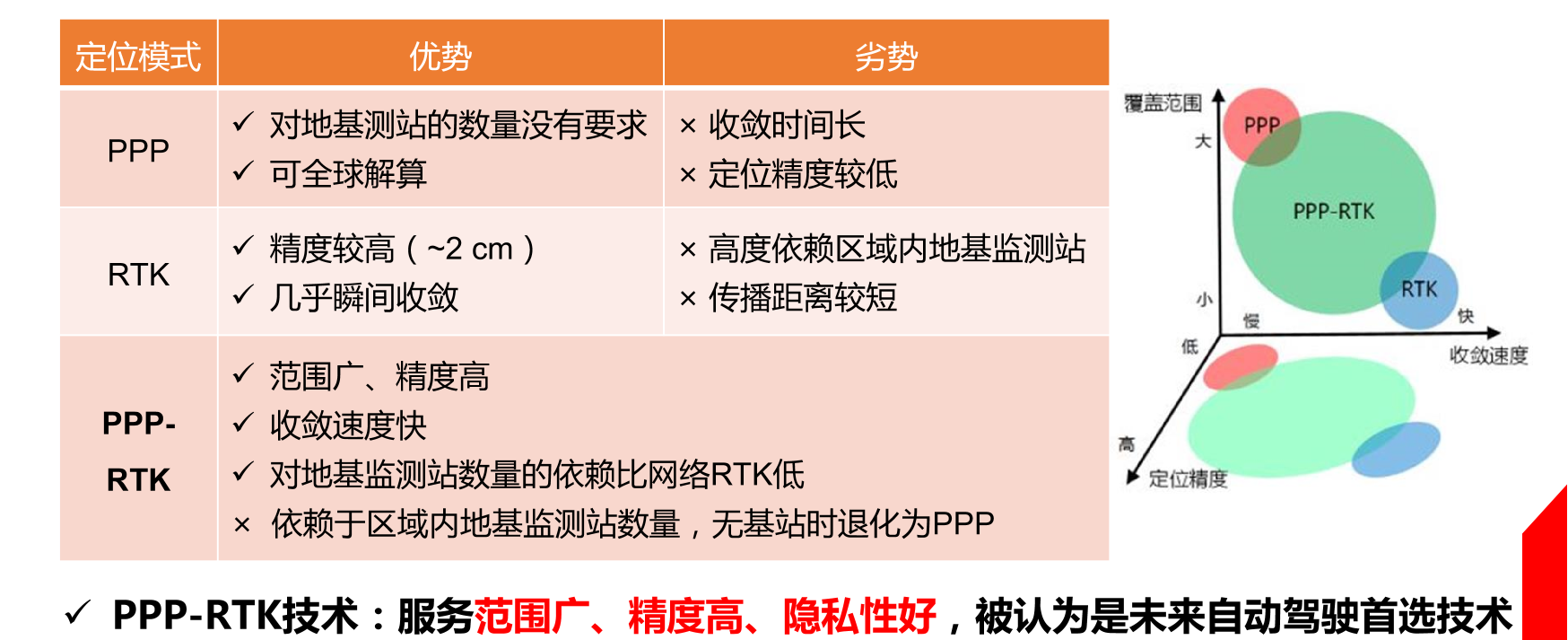
图片来源:《PPP-RTK技术面临的机遇与挑战》,张小红,任晓东,武汉大学测绘学院
日本准天顶卫星系统(QZSS)已率先基于其L6D信号实现了星基PPP-RTK增强服务——CLAS(Centimeter Level Augmentation Service),数据播发速率2000bps,服务范围覆盖日本本土。此外,也有一些商业公司开始提供PPP-RTK服务,例如Trimble公司的CenterPoint RTX服务、NovAtel公司的TerraStar-X服务、Fugro公司的Marinestar G4+服务以及GEO++公司的SSRPOST服务等。虽然上述商业服务或多或少用到(至少借鉴)了PPP-RTK技术,但其电离层延迟模型表达、编码格式、播发方案等都鲜有公开资料可供参考。
对PPP-RTK来说,最关键的是电离层模型。PPP-RTK初始化时间严重依赖电离层模型精度。当电离层误差小于0.5TECU时 ,初始化时间可优于1min。
电离层模型不是那么好做的,特别是在低纬度和高纬度地区,受太阳粒子影响是没有规律或者短时间内很难总结出规律,很难建立电离层模型。这就是所谓的电离层闪烁。

图片来源:《PPP-RTK技术面临的机遇与挑战》,张小红,任晓东,武汉大学测绘学院
不过电离层闪烁通常只发生在晚上11点到日出前,这段时间内不适用智能驾驶就行,而这段时间内大部分人都已经睡了。
不过PPP-RTK对于中美这种疆域辽阔的国家来说建设难度颇大,日本狭长的国土只需要4颗低轨道卫星即可覆盖,中美不大可能为了智能驾驶而发射几十颗低轨道卫星的。
即便是PPP-RTK也不是万能的,城市复杂环境,GPS信号丢失是无法避免的,要实现无人驾驶,就少不了高精度的惯性导航系统(INS)。

当GNSS信号遮挡严重时,无论PPP或PPP-RTK都只能提供1至2米的定位服务,此时只有采用PPP-RTK/INS协同精密定位,才可实现平面分米级定位。INS精度取决于车辆速度,如果不超过时速60公里,那么2万元以下的INS应该就可以满足GPS信号丢失10秒的情景。如果时速120公里,那恐怕需要20万元以上的INS系统了。
所以还是踏踏实实搞L2+, L2++, L2+++。能做好L2也是相当不容易的,这也是国内企业特别是芯片企业的机会。